
عضلات مصنوعی در خدمت سرکوب لرزشهای حرکتی
عضلات مصنوعی در خدمت سرکوب لرزشهای حرکتی
برآوردها نشان میدهند که حدود ۸۰ میلیون نفر در سراسر جهان با نوعی لرزش غیرارادی زندگی میکنند؛ برای مثال، بسیاری از مبتلایان به بیماری پارکینسون.
به گزارش نیوزلن و به نقل از ساینسدیلی، این حرکات ناآگاهانه و دورهای میتوانند بهشدت توانایی انجام فعالیتهای روزمره مانند نوشیدن از لیوان یا نوشتن را تحت تأثیر قرار دهند. در این میان، دستگاههای پوشیدنی رباتیک نرم به عنوان راهحلی بالقوه برای سرکوب این لرزشها مطرح شدهاند.
با این حال، نمونههای اولیه موجود هنوز به اندازهای پیشرفته نیستند که بتوانند راهحلی واقعی و مؤثر ارائه دهند.
دانشمندان مؤسسه ماکس پلانک برای سامانههای هوشمند (MPI-IS)، دانشگاه توبینگن و دانشگاه اشتوتگارت که تحت همکاری مشترک BITS (هوش زیستی توبینگن-اشتوتگارت) فعالیت میکنند، قصد دارند این وضعیت را تغییر دهند.
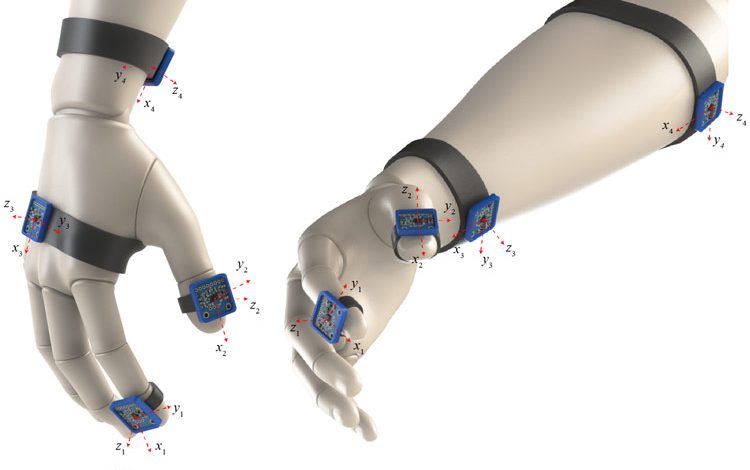
تیم تحقیقاتی آنها بازویی زیستی-رباتیکی را طراحی کرده که دو رشته عضله مصنوعی سبکوزن در امتداد ساعد آن قرار گرفته است.
گفتنی است این بازو که به آن لقب «بیمار مکانیکی» دادهاند، قادر است لرزشهای واقعی بیماران را شبیهسازی کند. برای این منظور، لرزش چند بیمار ثبت شده و سپس به بازوی رباتیک منتقل شده تا حرکات دست و مچ بهطور واقعی بازسازی شود.
اما زمانی که سامانهی سرکوب لرزش فعال میشود، عضلات مصنوعی از جنس عملگرهای الکترو-هیدرولیکی منقبض و منبسط شده و بهگونهای عمل میکنند که حرکت رفتوبرگشتی ناشی از لرزش را جبران کنند. در نتیجه، لرزش تقریباً دیگر قابل احساس یا مشاهده نیست.
این بازو دو هدف را دنبال میکند: نخست، به عنوان بستری برای آزمایش ایدههای جدید در زمینه اسکلتهای خارجی کمکی، در اختیار سایر پژوهشگران قرار میگیرد.
به کمک شبیهسازیهای زیستمکانیکی رایانهای، پژوهشگران میتوانند بدون نیاز به آزمایشهای پرهزینه و زمانبر بالینی، عملکرد عضلات مصنوعی نرم را ارزیابی کنند—حتی در کشورهایی که انجام این آزمایشها روی بیماران واقعی از نظر قانونی ممکن نیست.
شایان ذکر است این بازو همچنین محملی برای آزمودن عضلات مصنوعیای است که توسط دپارتمان مواد رباتیک در مؤسسه ماکس پلانک توسعه یافتهاند. این عضلات که با نام HASEL شناخته میشوند، در طی سالها بهطور قابل توجهی بهبود یافتهاند.
دیدگاه تیم تحقیقاتی آن است که این عضلات در آینده پایه و اساس دستگاههای پوشیدنی کمکی شوند تا افراد مبتلا به لرزش بتوانند با آسودگی بیشتری فعالیتهای روزمره خود را انجام دهند، مثلاً فنجانی را در دست بگیرند.
آلونا شاگان شمرون، پژوهشگر پسادکتری در دپارتمان مواد رباتیک و نویسنده اصلی مقاله منتشرشده در مجله Device، میگوید: «ما پتانسیل بالایی برای استفاده از این عضلات در طراحی لباسهایی میبینیم که فرد بتواند آن را بهشکلی کاملاً نامحسوس بپوشد، بهطوریکه دیگران حتی متوجه لرزش او نشوند.»
وی میافزاید: «ما نشان دادیم که عضلات مصنوعی ما که مبتنی بر فناوری HASEL هستند، از سرعت و قدرت کافی برای مقابله با دامنه وسیعی از لرزشهای مچ دست برخوردارند.»
دنیل هوفله، استاد مؤسسه هرتی برای تحقیقات بالینی مغز در دانشگاه توبینگن و از اعضای تیم تحقیقاتی نیز میگوید: «ترکیب بیمار مکانیکی با مدلهای زیستمکانیکی به ما امکان میدهد که بسنجیم آیا عضلات مصنوعی توانایی سرکوب انواع لرزشها، حتی شدیدترین آنها را دارند یا خیر.
در نتیجه، اگر روزی دستگاهی پوشیدنی طراحی شود، میتوان آن را بهطور اختصاصی با ویژگیهای لرزش هر بیمار تنظیم کرد.»
گفته میشود که این بیمار مکانیکی ابزاری کلیدی در شناسایی قابلیتهای فناوریهای جدید در مراحل ابتدایی توسعه است، آن هم بدون نیاز به آزمایشهای بالینی پرهزینه.
استاد زین اشمیت از دانشگاه اشتوتگارت میگوید: «ایدههای خوبی در حوزه فناوری پزشکی اغلب به مرحله اجرا نمیرسند، زیرا آزمایشهای بالینی در مراحل اولیه بسیار دشوار و گران هستند. این مدل مکانیکی راهحلی مؤثر برای این مشکل است.»
در پایان، کریستف کپلینگر، مدیر دپارتمان مواد رباتیک در MPI-IS خاطرنشان میکند: «رباتیک ظرفیت بالایی برای تحول در حوزه سلامت دارد. این پروژه موفق، نقش کلیدی سامانههای رباتیک نرم و انعطافپذیر را بهخوبی به نمایش میگذارد.»